Ιστότοπος 1ου ΕΠΑ.Λ. Πύργου - http://1epal-pyrgou.ilei.sch.gr/
Βιονικό Χέρι

Βιονικό Χέρι
Τομείς: Τομέας Ηλεκτρολογίας και Τομέας Πληροφορικής
Συμμετέχοντες μαθητές: Βράπη Σελντιόν, Μαντάς Παναγιώτης, Παναγόπουλος Ηλίας της Γ' Ηλεκτρολόγων και
Γεωργούλη Κωνσταντίνα, Γιαννοπούλου Νικολέττα και Τριαντοπούλου Ελπίδα της Β' Πληροφορικής.
Επιβλέποντες καθηγητές: Αδαμόπουλος Νίκος και Πανόπουλος Θανάσης.
Περιγραφή του έργου
 Μία ηλεκτρομηχανική προσομοίωση κινήσεων χεριού, όπου ο βραχίονας κινείται αριστερά-δεξιά σε επιθυμητή θέση με σερβομοτέρ, σηκώνει το αντιβράχιο με πνευματικό μυ και κινούνται τα δάχτυλα με ηλεκτρομαγνήτες, ενώ μπορεί να παίζει ακόμα και πιάνο ελεγχόμενος από Η/Υ ή από χειριστήριο. Είναι μία εποπτική εφαρμογή των παρακάτω μηχανισμών κίνησης ρομποτικών συστημάτων και ελέγχου μέσω Η/Υ και interface.
Μία ηλεκτρομηχανική προσομοίωση κινήσεων χεριού, όπου ο βραχίονας κινείται αριστερά-δεξιά σε επιθυμητή θέση με σερβομοτέρ, σηκώνει το αντιβράχιο με πνευματικό μυ και κινούνται τα δάχτυλα με ηλεκτρομαγνήτες, ενώ μπορεί να παίζει ακόμα και πιάνο ελεγχόμενος από Η/Υ ή από χειριστήριο. Είναι μία εποπτική εφαρμογή των παρακάτω μηχανισμών κίνησης ρομποτικών συστημάτων και ελέγχου μέσω Η/Υ και interface.
Παρουσίαση έργου σε Video
| Επίδειξη Βιονικό Χέρι |
Βραβεία
Τα Ηλεκτρομηχανικά Μέρη

Σερβοκινητήρας Ηλεκτρικό μοτέρ με γραναζομειωτήρα στροφών που στρέφει τον άξονα του σε επιθυμητή γωνία. Μέσω ηλεκτρονικού κυκλώματος καθορίζουμε την επιθυμητή γωνία με μία μεταβλητή αντίσταση, ο συγκριτής δίνει την κατάλληλη τάση στο μοτέρ που στρέφοντας τον άξονά του στρέφει μία δεύτερη μεταβλητή αντίσταση. Όταν εξισωθούν οι δύο μεταβλητές, ο κινητήρας σταματάει στην επιθυμητή γωνία. Ιδιοκατασκευή μας από μοτέρ υαλοκαθαριστήρα αυτοκινήτου.


Πνευματικός Μυς Ένας λαστιχένιος σωλήνας μέσα σε εύκαμπτο δικτυωτό μανδύα φουσκώνει με πεπιεσμένο αέρα και συστέλλεται κατά μήκος (περίπου 25%) με δύναμη. Μοιάζει πολύ με την λειτουργία του ανθρώπινου μυ και πλεονεκτεί του κυλίνδρου-εμβόλου στα εξής:
- Μικρός, ελαφρύς και δυνατός. Σηκώνει 400 φορές το βάρος του περίπου.
- Εύκαμπτο, λειτουργεί και τυλιγμένο σε γωνίες.
- Στεγανό, λειτουργεί και μέσα στο νερό. Τα κατασκευάσαμε με μπαλόνι και δικτυωτό πλέγμα.


Ηλεκτρομαγνήτης Εδώ 5 ιδιοκατασκευασμένοι σωληνοειδείς ηλεκτρομαγνήτες (με ρεύμα ελεγχόμενο από τρανζίστορ) κινούν τα δάκτυλα, τραβώντας τένοντες όπως ακριβώς και οι ελκτικοί μυς των δακτύλων μας.

Ηλεκτροβαλβίδα Δίνοντας τάση στον ηλεκτρομαγνήτη της έλκει μία βαλβίδα και επιτρέπει την δίοδο αέρα ή υγρού υπό πίεση.
-
Interface Ηλεκτρονικό κύκλωμα που συνδέει τον Η/Υ με τους παραπάνω ηλεκτρικούς ενεργοποιητές. Σε 8 pin της παράλληλης θύρας του PC βγαίνει τάση 4 ή 0 Volt (για λογικό 1 ή 0 αντίστοιχα). Η τάση ενεργοποιεί μικρό τρανζίστορ και αυτό καθιστά αγώγιμο άλλο τρανζίστορ ισχύος που δίνει ρεύμα στους ηλεκτρικούς ενεργοποιητές.
Το δικό μας κύκλωμα κατασκευάστηκε για έλεγχο ισχυρών ρευμάτων (4 Α) σε 8 ίδια κανάλια.


Ποδοκομπρεσέρ Ιδιοκατασκευή μας με πλαστικό μπουκάλι αναψυκτικού στο οποίο αποθηκεύεται αέρας συμπιεζόμενος από τρόμπα (σε 4 ατμ).
-
Χειριστήριο Τα παραπάνω ελέγχονται είτε από Η/Υ είτε από ιδιοκατασκευασμένο χειριστήριο μορφής παλάμης (με μεταβλητές αντιστάσεις και μπουτόν).
Προγραμματισμός και έλεγχος από Η/Υ
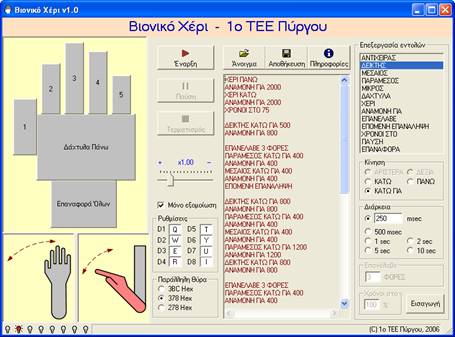
Για τον έλεγχο της κατασκευής μέσω Η/Υ αναπτύχθηκε κατάλληλο λογισμικό για χρήση από το παραθυρικό περιβάλλον των Windows. Μέσω αυτού είναι δυνατός ο έλεγχος όλων των δυνατών κινήσεων του χεριού ενώ ταυτόχρονα αυτές απεικονίζονται άμεσα με γραφικό τρόπο μέσα στο παράθυρο του προγράμματος. Ο έλεγχος πραγματοποιείται με τρεις διαφορετικές μεθόδους:
- Κάνοντας κλικ με το ποντίκι στα απεικονιζόμενα μέρη του χεριού οπότε και πραγματοποιείται αλλαγή της κατάστασής τους.
- Πατώντας πλήκτρα του πληκτρολογίου τα οποία αντιστοιχίζονται στα κινούμενα μέρη του χεριού.
- Συντάσσοντας και εκκινώντας πρόγραμμα ελέγχου το οποίο περιέχει κατάλληλες εντολές που έχουν σχεδιαστεί ώστε να είναι δυνατός ο εύκολος χρονοπρογραμματισμός όλων των δυνατών επιθυμητών κινήσεων των τμημάτων του χεριού.
Ειδικά μέσω της τελευταίας μεθόδου ελέγχου είναι δυνατή ακόμα και η εντελώς αυτόματη εκτέλεση από το βιονικό χέρι ενός μουσικού κομματιού πάνω σε ένα μικρό πιανάκι.
Για τη δημιουργία του προγράμματος ελέγχου προσφέρονται προς τον χρήστη κατάλληλα εργαλεία ώστε να μη χρειάζεται να θυμάται τη σύνταξη των εντολών και να είναι δυνατή η ολοκλήρωσή του ακόμα και χωρίς πληκτρολόγηση. Υπάρχουν ειδικές εντολές για την κίνηση του βραχίονα αριστερά, δεξιά, πάνω και κάτω, για την κίνηση οποιουδήποτε δακτύλου κάτω και πάνω, για τον καθορισμό της διάρκειας αναμονής ανάμεσα σε αυτές τις κινήσεις, για την επιτάχυνση ή την επιβράδυνση της εκτέλεσης των κινήσεων, για την επαναληπτική εκτέλεση εντολών, κλπ.
Επιπλέον υπάρχει δυνατότητα για αποθήκευση ενός προγράμματος ελέγχου ώστε να είναι δυνατή η επαναχρησιμοποίησή του απλά ανοίγοντάς το. Κατά τη διάρκεια εκτέλεσης ενός προγράμματος είναι δυνατή η προσωρινή διακοπή και η συνέχιση της εκτέλεσής του. Επίσης η αλλαγή του ρυθμού της εκτέλεσης των εντολών που περιέχει.
Η χρησιμοποίηση του λογισμικού είναι δυνατή ακόμα και χωρίς την παρουσία της υπόλοιπης κατασκευής αφού εξομοιώνει με οπτικό τρόπο τις αντίστοιχες κινήσεις του χεριού.
Περισσότερα στοιχεία και λεπτομέρεις για το έργο
1. Ηλεκτρονικό κύκλωμα του Interface
Η τάση ελέγχου (για ON) των 3,5 V στα pin 2, 3, 4, 5, 6, 7, 8, 9 και 10 του της παράλληλης θύρας του PC πολώνει τα τρανζίστορ Τ1 που άγουν και φέρνουν το - στα Led2 που ανάβουν μέσω των αντιστάσεων R2.
Έτσι πολώνεται η βάση των Τ2 τρανζίστορ ισχύος που άγουν και φέρνουν το - στα πέντε πηνία L των δακτύλων, στην ηλεκτροβάνα V για το φούσκωμα του πνευματικού μυ (ανύψωση αντιβραχίου) και στο ρελεδάκι C που ενεργοποιεί την κίνηση αριστερά – δεξιά του χεριού.
2. Ηλεκτρονικό κύκλωμα ελέγχου σερβομοτέρ θέσης χεριού
Οι μεταβλητές αντιστάσεις Ρ1 (επιθυμητής θέσης) και Ρ2 (πραγματικής θέσης) του χεριού αποτελούν μεταβλητό διαιρέτη τάσης. Αυξάνοντας με το χειριστήριο την P1, αυξάνεται και η τάση στα άκρα της σε σχέση με την P2. Ο διαφορικός συγκριτής (που αποτελείται από τους δύο τελεστικούς ενισχυτές Α1και Α2) συγκρίνει τις τάσεις και βγάζει στις εξόδους του a και b τάση με πολικότητα + και - αντίστοιχα και άγουν (ως ορθά έτσι πολωμένα) τα τρανζίστορ Τ1 και Τ4 που φέρνουν + και - 12V στα άκρα Α και Β του μοτέρ.
Ο άξονας στρέφει (π.χ. δεξιά) και μεταβάλει την P2 έως ότου γίνει ίση με την P1, και σταματάει αφού δεν υπάρχει διαφορά τάσεων. Το αντίστοιχο γίνεται μειώνοντας την P1 (ο συγκριτής βγάζει - και + στα a και b και άγουν τώρα τα τρανζίστορ Τ2 και Τ3 και φέρνουν τα - και + στα άκρα Α και Β του μοτέρ που στρέφει τώρα αριστερά έως ότου εξισωθούν πάλι οι μεταβλητές Ρ1 και Ρ2.
Είναι ΣΑΕ κλειστού βρόγχου με την Ρ1 είσοδο, Ρ2 ανάδραση, Α1 και Α2 σύγκριση, η γέφυρα Η των τρανζίστορ εντολέας και το μοτέρ Μ ενεργοποιητής (έξοδος). Η τάση στο μοτέρ είναι ανάλογη της διαφοράς επιθυμητής και πραγματικής θέσης του άξονα (συνεχής ρύθμιση). Οι αντιστάσεις Ρ5, R5, P4 και R4 εξισορροπούν τον συγκριτή και τα διόδια D προστατεύουν τα τρανζίστορ από τις ανάποδες τάσεις εξ’ αυτεπαγωγής των πηνίων του μοτέρ. Όταν οπλίσει το ρελέ C (από το PC) αλλάζει θέση η επαφή του και συνδέει τη μεταβλητή Ρ3 αντί Ρ1 οπότε το μοτέρ στρέφει αριστερά και σταματάει. Αφοπλίζοντας το ρελέ το μοτέρ επιστρέφει στην αρχική του θέση.
3. Χειριστήριο
Ακουμπώντας την παλάμη κλείνει το μπουτόν b1 και κινώντας τα δάχτυλα μεταβάλλονται οι μεταβλητές αντιστάσεις των δακτύλων (ΡΑ, ΡΔ, κλπ), που ρυθμίζουν (μέσω των τρανζίστορ Τ2) το ρεύμα των ηλεκτρομαγνητών και κινούνται έτσι τα δάχτυλα αργά ή γρήγορα και σε ενδιάμεσες θέσεις. Κινώντας την παλάμη αριστερά – δεξιά, κινείται μέσω της μεταβλητής Ρ1 και το χέρι αντίστοιχα. Με το μπουτόν b2 ενεργοποιείται η ηλεκτροπνευματική βαλβίδα ανύψωσης του χεριού για τον πνευματικό μυ.
4. Λογισμικό ελέγχου και προγραμματισμού των κινήσεων
Το λογισμικό για τον έλεγχο του βιονικού χεριού μέσω Η/Υ αναπτύχθηκε εκ του μηδενός από την ομάδα του έργου. Δίνει τη δυνατότητα για τον πλήρη έλεγχο των κινήσεων του χεριού ο οποίος μπορεί να είναι χειροκίνητος (πατώντας πλήκτρα του πληκτρολογίου ή με κλικ του ποντικού σε συγκεκριμένα σημεία του παραθύρου) ή προγραμματιζόμενος (με τη σύνταξη κατάλληλου προγράμματος χρησιμοποιώντας συγκεκριμένες εντολές που προβλέφθηκαν).
Για την ανάπτυξη του λογισμικού χρησιμοποιήθηκε το προγραμματιστικό περιβάλλον της Visual Basic 6. Για το σχεδιασμό των γραφικών αναπαραστάσεων του χεριού που βρίσκονται ενσωματωμένες στο λογισμικό αλλά και για τα σχήματα αυτής της έκθεσης χρησιμοποιήθηκε το Microsoft Visio 2003. Για τη δημιουργία των εικονιδίων του λογισμικού, την επεξεργασία των φωτογραφιών και τη δημιουργία του λογότυπου του έργου και χρησιμοποιήθηκε το Corel Photo-Paint 10.
Ενδεικτικά μεταξύ άλλων μέσα στο λογισμικό χρησιμοποιούνται:
- Ένα αντικείμενο τύπου status bar για τη γραμμή κατάστασης του λογισμικού όπου απεικονίζεται με τη μορφή leds η κατάσταση (λογικό 0 ή 1) των οκτώ γραμμών εξόδου της παράλληλης θύρας στην οποία συνδέεται η υπόλοιπη κατασκευή.
- Ένα αντικείμενο τύπου slider για την επιτάχυνση ή επιβράδυνση του ρυθμού εκτέλεσης των εντολών του προγράμματος ελέγχου σε πραγματικό χρόνο.
- Αντικείμενα τύπου button για το άνοιγμα και την αποθήκευση των προγραμμάτων ελέγχου, για τα κουμπιά της έναρξης, της παύσης/συνέχισης και του τερματισμού της εκτέλεσης αυτών των προγραμμάτων, για την αλλαγή της κατάστασης των δακτύλων, κ.α.
- Έξι αντικείμενα τύπου timer (ένα για τον έλεγχο της χρονικής καθυστέρησης ανάμεσα στην εκτέλεση διαδοχικών εντολών και από ένα για τον ειδικό χρονισμό που δημιουργήθηκε για καθένα από τα πέντε δάκτυλα).
Στο λογισμικό είναι δυνατός ο καθορισμός των εξής ρυθμίσεων:
α) των πλήκτρων που θα αντιστοιχούν στην αλλαγή της κατάστασης των οκτώ γραμμών εξόδου της παράλληλης θύρας (για τον χειροκίνητο έλεγχο των κινήσεων του χεριού μέσω του πληκτρολογίου),
β) της διεύθυνσης του ελεγκτή της παράλληλης θύρας (ανάμεσα στις $3BC, $378 και $278). Οι αλλαγές σε αυτές τις ρυθμίσεις αποθηκεύονται ώστε να μην απαιτείται κάθε φορά ο επανακαθορισμός τους.
5. Δημιουργία προγραμμάτων ελέγχου
Στον παρακάτω πίνακα φαίνονται οι εντολές με τις διάφορες παραλλαγές τους που μπορούν να χρησιμοποιηθούν στα πλαίσια ενός προγράμματος ελέγχου.
Έτσι πιο αναλυτικά:
- Οι εντολές ΑΝΤΙΧΕΙΡΑΣ, ΔΕΙΚΤΗΣ, ΜΕΣΑΙΟΣ, ΠΑΡΑΜΕΣΟΣ και ΜΙΚΡΟΣ συνδυάζονται με τις παραμέτρους ΠΑΝΩ (για κίνηση του αντίστοιχου δακτύλου προς τα πάνω), ΚΑΤΩ (για κίνηση προς τα κάτω) και ΚΑΤΩ ΓΙΑ ##### (##### είναι η διάρκεια σε χιλιοστά του δευτερολέπτου όπου το αντίστοιχο δάκτυλο θα παραμείνει στην κάτω θέση πριν αυτό ανέβει προς τα πάνω χωρίς την μεσολάβηση άλλης εντολής).
- Η εντολή ΔΑΧΤΥΛΑ συνδυάζεται με τις παραμέτρους ΠΑΝΩ και ΚΑΤΩ για ταυτόχρονη κίνηση όλων των δακτύλων προς τα πάνω και κάτω αντίστοιχα.
- Η εντολή ΧΕΡΙ συνδυάζεται με τις παραμέτρους ΠΑΝΩ, ΚΑΤΩ, ΑΡΙΣΤΕΡΑ και ΔΕΞΙΑ για κίνηση του χεριού προς τις αντίστοιχες κατευθύνσεις.
- Η εντολή ΑΝΑΜΟΝΗ ΓΙΑ ##### χρησιμοποιείται όταν υπάρχει ανάγκη για χρονική καθυστέρηση κατά την εκτέλεση διαδοχικών εντολών οπότε και θα πρέπει να παρεμβάλλεται ανάμεσά τους (##### είναι η διάρκεια σε χιλιοστά του δευτερολέπτου αυτής της καθυστέρησης).
- Οι εντολές ΕΠΑΝΕΛΑΒΕ ## ΦΟΡΕΣ και ΕΠΟΜΕΝΗ ΕΠΑΝΑΛΗΨΗ χρησιμοποιούνται όταν ένα σύνολο εντολών πρέπει να εκτελεστεί πολλές φορές. Η πρώτη εντολή θα πρέπει να εισάγεται αμέσως πριν από την πρώτη εντολή αυτού του συνόλου ενώ η δεύτερη αμέσως μετά από την τελευταία (## είναι ο αριθμός των επαναλήψεων).
- Η εντολή ΧΡΟΝΟΙ ΣΤΟ ### μεταβάλει την ερμηνεία (ως ποσοστό επί τις εκατό) για τις χρονικές διάρκειες στις εντολές που ακολουθούν. Έτσι π.χ. η εντολή ΧΡΟΝΟΙ ΣΤΟ 50 θα έχει ως αποτέλεσμα την εκτέλεση όλων των εντολών που ακολουθούν στο 50% της ονομαστικής χρονικής διάρκειας, άρα με διπλάσια ταχύτητα. Είναι ένας εύκολος τρόπος να επιταχύνουμε ή να επιβραδύνουμε την εκτέλεση των εντολών χωρίς να απαιτείται κάθε φορά η τροποποίηση των αριθμών σε πάρα πολλές εντολές.
- Η εντολή ΠΑΥΣΗ προκαλεί προσωρινή διακοπή της εκτέλεσης των εντολών. Η συνέχιση της εκτέλεσης γίνεται κάνοντας κλικ με το ποντίκι στο σχετικό κουμπί του παραθύρου.
- Η εντολή ΕΠΑΝΑΦΟΡΑ μετακινεί όλα τα κινητά μέρη του χεριού στη φυσική τους θέση. Έτσι ανεβαίνουν όλα τα δάκτυλα και το χέρι μετακινείται κάτω και δεξιά. Εισάγεται συνήθως στην αρχή ή/και στο τέλος των προγραμμάτων ελέγχου.
| Πίνακας Εντολών Προγράμματος Ελέγχου | Παράδειγμα Προγράμματος Ελέγχου | |
|---|---|---|
ΑΝΤΙΧΕΙΡΑΣ |
ΠΑΝΩ |
ΕΠΑΝΕΛΑΒΕ 3 ΦΟΡΕΣ |
ΚΑΤΩ |
||
ΚΑΤΩ ΓΙΑ ##### |
||
ΔΑΧΤΥΛΑ |
ΠΑΝΩ |
|
ΧΕΡΙ |
ΠΑΝΩ |
|
ΑΝΑΜΟΝΗ ΓΙΑ ##### |
||
ΕΠΑΝΕΛΑΒΕ ## ΦΟΡΕΣ |
||
ΕΠΟΜΕΝΗ ΕΠΑΝΑΛΗΨΗ |
||
ΧΡΟΝΟΙ ΣΤΟ ### |
||
ΠΑΥΣΗ |
||
ΕΠΑΝΑΦΟΡΑ |
||
Στον παραπάνω πίνακα υπάρχει και ένα παράδειγμα από ένα μικρό πρόγραμμα ελέγχου. Έτσι στην έναρξη της εκτέλεσης του προγράμματος γίνεται 3 φορές το εξής: ο αντίχειρας κατεβαίνει και ανεβαίνει με χρονική καθυστέρηση 1 sec ανάμεσα σε αυτές τις μετακινήσεις. Στη συνέχεια η εκτέλεση μπαίνει σε κατάσταση προσωρινής διακοπής μέχρι να γίνει κλικ με το ποντίκι στο κουμπί της συνέχισης. Ο δείκτης κατεβαίνει και μετά από 2 sec ανεβαίνει πάλι χωρίς να υπάρχει ειδική εντολή για κάτι τέτοιο. 4 sec μετά από τη στιγμή που ο δείκτης κατέβηκε (και που στο μεταξύ αυτός έχει ήδη ανεβεί) κατεβαίνουν όλα τα δάκτυλα και μετά από 1 sec ανεβαίνουν ξανά ενώ ταυτόχρονα μετακινείται όλο το χέρι προς τα πάνω. Μετά από 1 sec το χέρι ξανακατεβαίνει. Μετά από 1 sec τα χέρι κινείται ταυτόχρονα προς τα αριστερά και προς τα πάνω ενώ τα δάκτυλα κατεβαίνουν. Τέλος, αφού περάσουν 3 sec επιστρέφουν όλα στην αρχική τους θέση.
Μέσα στο λογισμικό δημιουργήθηκε κατάλληλο εργαλείο διαμόρφωσης και επεξεργασίας των εντολών του προγράμματος ελέγχου ώστε να μην απαιτείται από το χρήστη η απομνημόνευση της ακριβούς σύνταξής τους αλλά ούτε καν η πληκτρολόγησή τους.
Παρακάτω παρατίθενται μερικά στιγμιότυπα από αυτό το εργαλείο για εντολές που απαιτούν τον καθορισμό πρόσθετων παραμέτρων.
|
|
|
|
|
|






Επιλογές
- Αρχική σελίδα
- Τελευταία Νέα και Ανακοινώσεις
- Το σχολείο μας
- Εκδηλώσεις
- Συμμετοχές σε εκθέσεις και διαγωνισμούς
- Το σχολείο μας τα ΜΜΕ
- Χρήσιμοι σύνδεσμοι
- Επικοινωνία
ΕΠΑ.Λ.
Τομέις
- Τομέας Πληροφορικής
- Τομέας Μηχανολογίας
- Τομέας Ηλεκτρολογίας
- Τομέας Ηλεκτρονικής
- Τομέας Δομικών Έργων
- Τομέας Οχημάτων
Έργα
- Hydrobot
- Συρματόμυς
- Βιονικό χέρι
- Τηλερομπότ
- Μαγνητικά Τρένα
- Σεισμογράφος με Η/Υ
- Ηλεκτρομηχανικό Ηλιοτρόπιο
- Το ρομπότ μας
Lego Mindstorms ΝΧΤ
Διάφορα
._.